Control the maze. Control the motion.
00

problem
Maze games have traditionally been mechanical systems controlled directly by hand, offering limited exploration of how digital interfaces can influence physical environments. The challenge was to design a system that bridges the gap between digital input and physical motion, enabling users to interact with a real-world object through an electronic interface while maintaining precision, responsiveness, and intuitive control.
solution
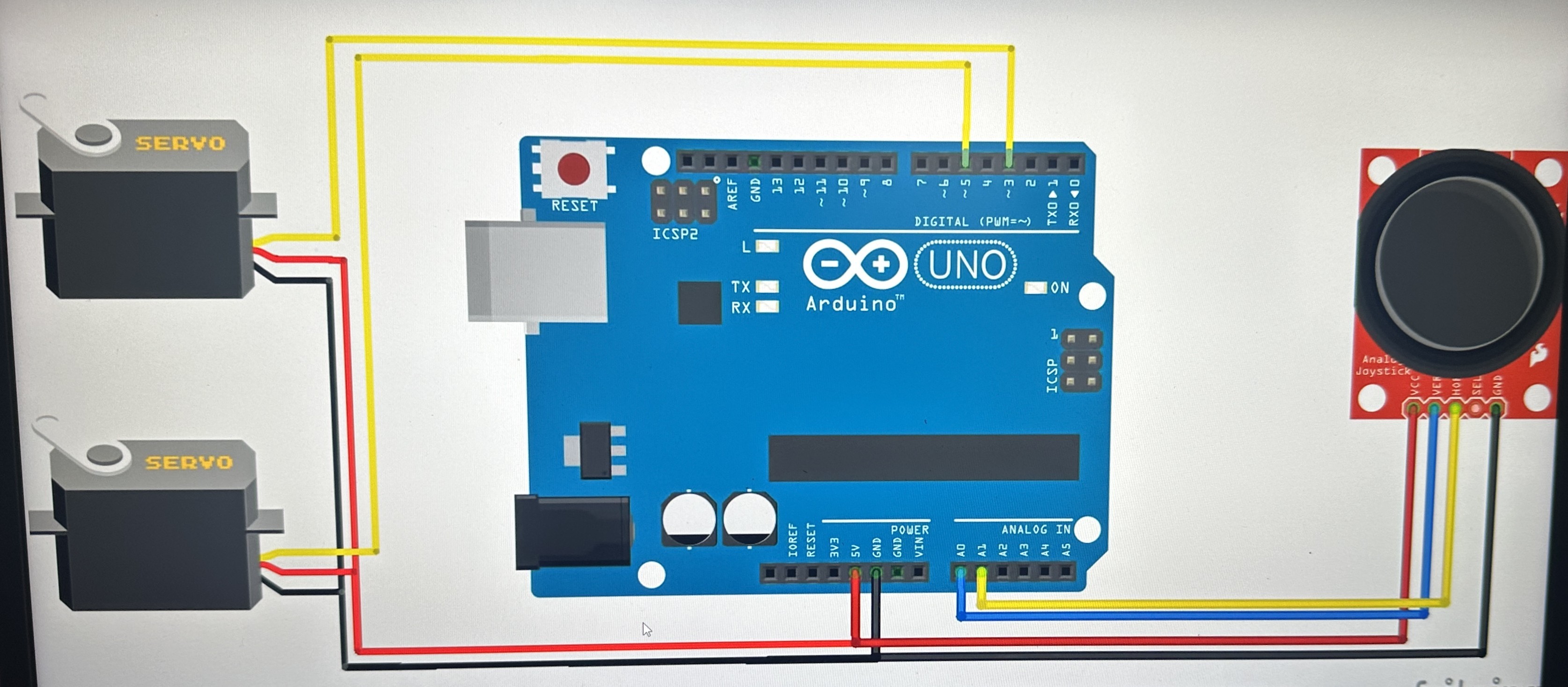
MAZEIT introduces an interactive system where user input is translated into controlled mechanical movement. A joystick module captures directional input along two axes and sends analog signals to an Arduino microcontroller. The Arduino processes this data and actuates two servo motors that tilt the maze platform using a ball-and-socket joint mechanism. This system enables users to guide a ball through the maze with precision, creating a seamless connection between interaction, computation, and physical response.
Introduction
MAZEIT was developed during my initial exploration into physical computing, where I was introduced to microcontrollers, sensors, and actuators for the first time.
This phase of learning opened up new ways of thinking about how digital systems can interact with the physical world.
Inspiration
The idea originated from observing a self-balancing surface plate designed to stabilize a ball.
This sparked a key question:
If a system can balance a ball, can it also control its movement intentionally?
This question became the foundation of MAZEIT shifting the idea from stabilization to controlled manipulation.
year
2024
timeframe
14 days
tools
ArduinoIDE , Fusion 360 , Illustrator
category
Physical Computing
Concept Development
The initial approach focused on building a tilting platform controlled along two axes using servo motors.
The structure was designed around a ball-and-socket joint, allowing the platform to tilt freely while maintaining a stable pivot point.
Once the motion system was functional, the concept evolved into a maze-based interaction where the platform’s tilt could be used to navigate a ball through a defined path.
This transition transformed the project from a technical experiment into a playful and interactive system.
Interaction
MAZEIT is controlled through a joystick interface that directly influences the movement of the maze platform.
• Moving the joystick changes the tilt of the surface
• The platform responds instantly to input
• The ball moves naturally through gravity
This creates a direct relationship between user input and physical behavior, making the interaction intuitive, responsive, and engaging.
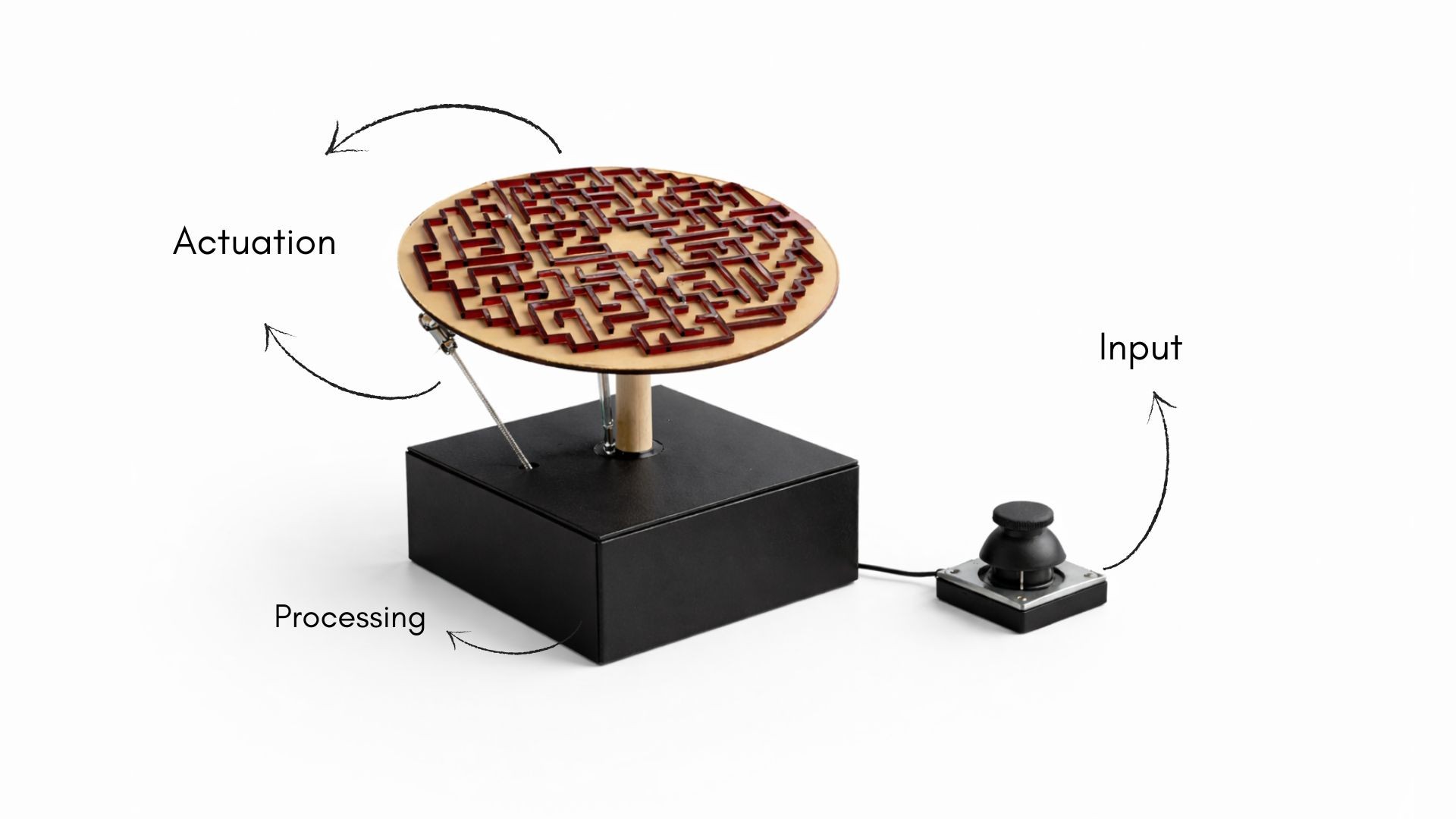
System Architecture
The system is built on three key layers:
Input
A joystick captures movement across X and Y axes
Processing
An Arduino Uno interprets analog signals and maps them to motion
Actuation
Two servo motors tilt the platform through mechanical linkage
Together, these layers create a system that converts digital signals into real-time physical motion
Fabrication & Build
The maze structure was fabricated using a combination of MDF and acrylic.
The base platform was laser-cut from MDF, while acrylic walls were used to create the maze pathways with clarity and precision.
The mechanical system includes a central support with a ball-and-socket joint, allowing smooth multi-directional tilt.
Electronics were assembled using breadboards and integrated into the base structure, forming a compact prototype.
Outcome
The final prototype successfully demonstrates how digital interfaces can control physical systems in an intuitive way.
MAZEIT transforms a simple maze into an interactive experience where users engage with both technology and physical mechanics simultaneously.
The project highlights the integration of interaction design, electronics, and mechanical systems into a cohesive product.





